Static maps¶
Download data¶
Before we start you need to download (and then extract) the dataset zip-package used during this lesson from this link.
You should have following Shapefiles in the dataE5 folder:
addresses.shp
metro.shp
roads.shp
some.geojson
TravelTimes_to_5975375_RailwayStation.shp
Vaestotietoruudukko_2015.shp
Extract the files into a folder called data:
$ cd /home/jovyan/work/autogis/notebooks/notebooks/L5
$ wget https://github.com/Automating-GIS-processes/Lesson-5-Making-Maps/raw/master/data/dataE5.zip
$ unzip dataE5.zip -d data
Static maps in Geopandas¶
We have already plotted basic static maps using geopandas during the previous weeks of this course. Remember that when using the plot() method in geopandas, we are actually using the tools available from matplotlib pyplot.
Let’s refresh our memory about the basics of plotting maps by creating a static accessibility map with roads and metro line on it (three layers on top of each other in the same figure). Before plotting the layers, we need to check that they are in the same coordinate reference system.
Read input files:
import geopandas as gpd
from pyproj import CRS
import matplotlib.pyplot as plt
%matplotlib inline
# Filepaths
grid_fp = "data/TravelTimes_to_5975375_RailwayStation.shp"
roads_fp = "data/roads.shp"
metro_fp = "data/metro.shp"
# Read files
grid = gpd.read_file(grid_fp)
roads = gpd.read_file(roads_fp)
metro = gpd.read_file(metro_fp)
Task
Check the coordinate reference systems (crs) of the input files. In case they are not in the same crs, re-project the layers into a common crs.
# Check the crs of each layer
print(roads.crs)
print(metro.crs)
print(grid.crs)
{'init': 'epsg:2392'}
{'init': 'epsg:2392'}
{'init': 'epsg:3067'}
# Roads and the metro are in an old Finnish crs, while the grid is in ETRS89 / TM35FIN:
print("Roads crs:", CRS(roads.crs).name)
print("Metro crs:", CRS(metro.crs).name)
print("Grid crs: ",CRS(grid.crs).name)
Roads crs: KKJ / Finland zone 2
Metro crs: KKJ / Finland zone 2
Grid crs: ETRS89 / TM35FIN(E,N)
# Reproject geometries to ETRS89 / TM35FIN based on the grid crs:
roads = roads.to_crs(crs=grid.crs)
metro = metro.to_crs(crs=grid.crs)
# Now the layers should be in the same crs
roads.crs == metro.crs == grid.crs
True
Once the data are in the same projection, we can plot them on a map.
Task
Make a visualization using the
plot()-function in Geopandasplot first the grid using “quantiles” classification scheme
then add roads and metro in the same plot
Plotting options for the polygon:
Define the classification scheme using the
schemeparameterChange the colormap using the
cmapparameter. See [colormap options from matplotlib documentation].(https://matplotlib.org/3.1.0/tutorials/colors/colormaps.html#choosing-colormaps-in-matplotlib)You can add a little bit of transparency for the grid using the
alphaparameter (ranges from 0 to 1 where 0 is fully transparent and 1 has no transparency)
Plotting options fo the lines:
adjust color using
colorparameter. See color options from matplotlib pyplot documentation.change
linewidthif needed
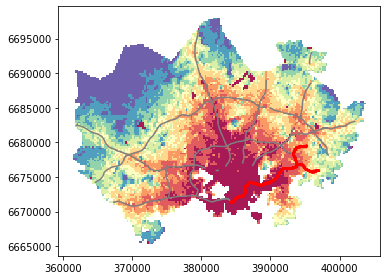
# Visualize the travel times into 9 classes using "Quantiles" classification scheme
my_map = grid.plot(column="car_r_t", linewidth=0.03, cmap="Spectral", scheme="quantiles", k=9, alpha=0.9)
# Add roads on top of the grid
# (use ax parameter to define the map on top of which the second items are plotted)
roads.plot(ax=my_map, color="grey", linewidth=1.5)
# Add metro on top of the previous map
metro.plot(ax=my_map, color="red", linewidth=2.5)
# Remove the empty white-space around the axes
plt.tight_layout()
# Save the figure as png file with resolution of 300 dpi
outfp = "static_map.png"
plt.savefig(outfp, dpi=300)
# Save the figure as svg file
outfp = "static_map.svg"
plt.savefig(outfp, format='svg')
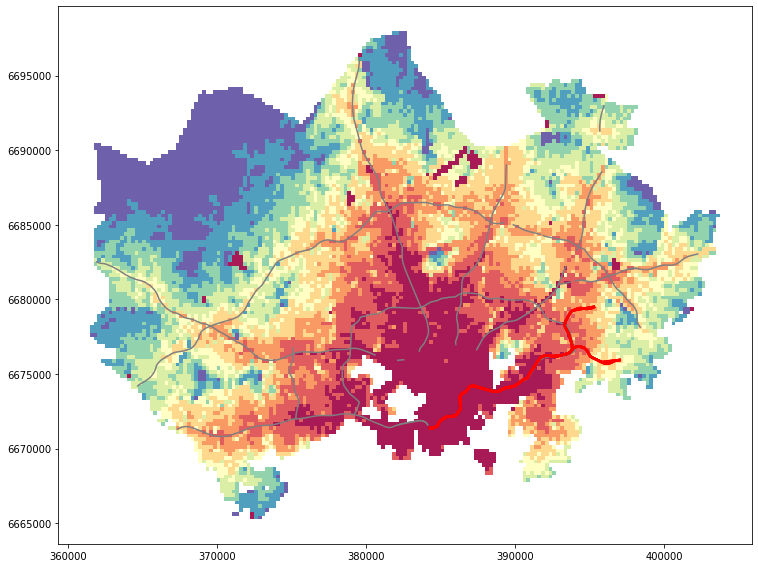
# For better control of the figure and axes, use the plt.subplots function before plotting the layers
# https://matplotlib.org/3.1.0/gallery/subplots_axes_and_figures/subplots_demo.html#a-figure-with-just-one-subplot
# Control figure size in here
fig, ax = plt.subplots(figsize=(12,8))
# Visualize the travel times into 9 classes using "Quantiles" classification scheme
grid.plot(ax=ax, column="car_r_t", linewidth=0.03, cmap="Spectral", scheme="quantiles", k=9, alpha=0.9)
# Add roads on top of the grid
# (use ax parameter to define the map on top of which the second items are plotted)
roads.plot(ax=ax, color="grey", linewidth=1.5)
# Add metro on top of the previous map
metro.plot(ax=ax, color="red", linewidth=2.5)
# Remove the empty white-space around the axes
plt.tight_layout()
# Save the figure as png file with resolution of 300 dpi
outfp = "static_map2.png"
plt.savefig(outfp, dpi=300)
Adding basemap from external source¶
It is often useful to add a basemap to your visualization that shows e.g. streets and their names and other useful information directly underneath your visualization. This can be done easily by using ready-made background map tiles that are provided by different providers such as OpenStreetMap or Stamen Design. A Python library called contextily is a handy package that can be used to fetch geospatial raster files and add them to your maps. Map tiles are typically distributed in Web Mercator projection (EPSG:3857), hence it is often necessary to reproject all the spatial data into Web Mercator before visualizing the data.
In this tutorial, we will see how to add a basemap underneath our previous visualization.
Read in the travel time data:
import geopandas as gpd
import matplotlib.pyplot as plt
import contextily as ctx
%matplotlib inline
# Filepaths
grid_fp = "data/TravelTimes_to_5975375_RailwayStation.shp"
# Read data
grid = gpd.read_file(grid_fp)
grid.head(2)
| car_m_d | car_m_t | car_r_d | car_r_t | from_id | pt_m_d | pt_m_t | pt_m_tt | pt_r_d | pt_r_t | pt_r_tt | to_id | walk_d | walk_t | geometry | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 32297 | 43 | 32260 | 48 | 5785640 | 32616 | 116 | 147 | 32616 | 108 | 139 | 5975375 | 32164 | 459 | POLYGON ((382000.000 6697750.000, 381750.000 6... |
| 1 | 32508 | 43 | 32471 | 49 | 5785641 | 32822 | 119 | 145 | 32822 | 111 | 133 | 5975375 | 29547 | 422 | POLYGON ((382250.000 6697750.000, 382000.000 6... |
Check the input crs:
grid.crs
{'init': 'epsg:3067'}
reproject the layer to ESPG 3857 projection (Web Mercator)
# Reproject to EPSG 3857
data = grid.to_crs(epsg=3857)
data.crs
{'init': 'epsg:3857', 'no_defs': True}
data.head(2)
| car_m_d | car_m_t | car_r_d | car_r_t | from_id | pt_m_d | pt_m_t | pt_m_tt | pt_r_d | pt_r_t | pt_r_tt | to_id | walk_d | walk_t | geometry | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 32297 | 43 | 32260 | 48 | 5785640 | 32616 | 116 | 147 | 32616 | 108 | 139 | 5975375 | 32164 | 459 | POLYGON ((2767221.646 8489079.101, 2766716.966... |
| 1 | 32508 | 43 | 32471 | 49 | 5785641 | 32822 | 119 | 145 | 32822 | 111 | 133 | 5975375 | 29547 | 422 | POLYGON ((2767726.329 8489095.521, 2767221.646... |
Now as we can see, the data has been projected to epsg:3857. Also the coordinate values in the geometry column have changed.
Next, we can plot our data using Geopandas and add a basemap for our plot by using a function called
.add_basemap()from contextily:
# Control figure size in here
fig, ax = plt.subplots(figsize=(12,8))
# Plot the data
data.plot(ax=ax, column='pt_r_t', cmap='RdYlBu', linewidth=0, scheme="quantiles", k=9, alpha=0.6)
# Add basemap
ctx.add_basemap(ax)
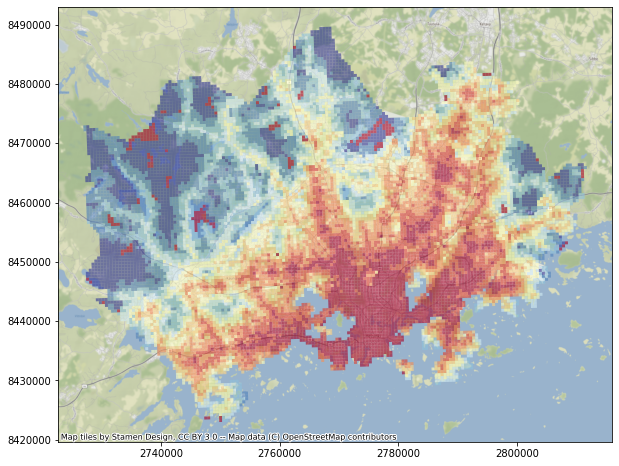
As we can see, now the map has a background map that is by default using a style ST_Terrain fetched from Stamen Design.
However, there are various other possible data sources and styles that can be used.
tile_providerscontain some of the basic url-addresses for different providers and styles that can be used to control the appearence of your background map:
dir(ctx.tile_providers)
['OSM_A',
'OSM_B',
'OSM_C',
'ST_TERRAIN',
'ST_TERRAIN_BACKGROUND',
'ST_TERRAIN_LABELS',
'ST_TERRAIN_LINES',
'ST_TONER',
'ST_TONER_BACKGROUND',
'ST_TONER_HYBRID',
'ST_TONER_LABELS',
'ST_TONER_LINES',
'ST_TONER_LITE',
'ST_WATERCOLOR',
'__builtins__',
'__cached__',
'__doc__',
'__file__',
'__loader__',
'__name__',
'__package__',
'__spec__']
Here, all the names written in capital letters are the ones that can be used as different basemap styles. All names starting with ST_ are from Stamen Design, and the OSM_A (B and C) are a basic map tile style provided by OpenStreetMap. Notice that the letters A, B, and C are only directing to different tile servers, they are not changing the style. It is also possible to pass other tile providers by passing in the url for the tile provider that you are interested in.
It is possible to change the tile provider by passing an address to the tile providers’ web address using
url-parameter inadd_basemap(). Let’s see how we can change the style toOSM_Awhich gives us a background map based on OpenStreetMap:
# Control figure size in here
fig, ax = plt.subplots(figsize=(12,8))
# Plot the data
data.plot(ax=ax, column='pt_r_t', cmap='RdYlBu', linewidth=0, scheme="quantiles", k=9, alpha=0.6)
# Add basemap with `ST_TONER` style
ctx.add_basemap(ax, url=ctx.tile_providers.OSM_A)
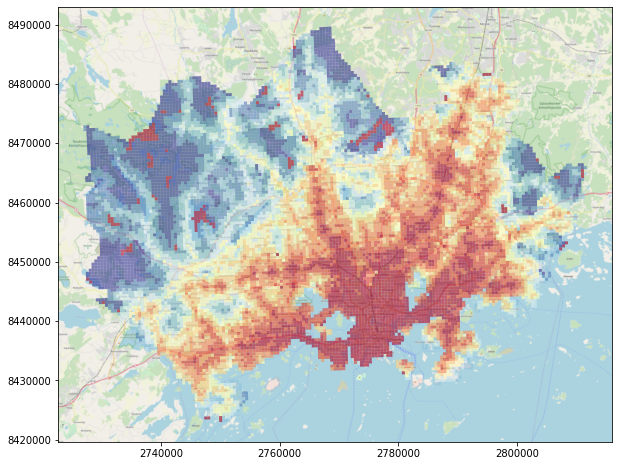
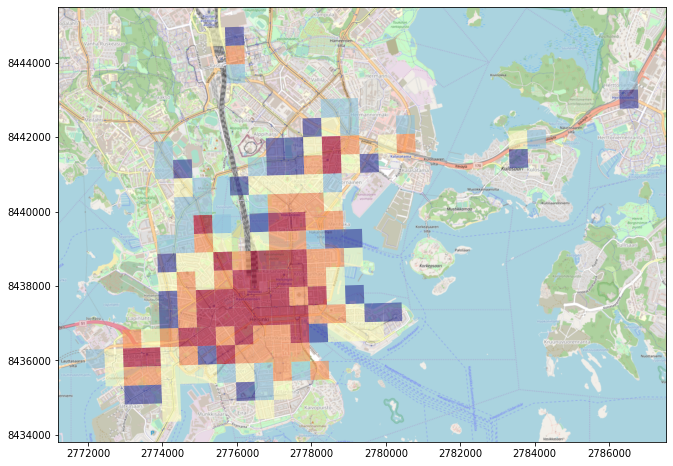
As we can see, now the background map changed a bit compared to the earlier one as it was fetched from OpenSteetMap.
Let’s take a subset of our data to see a bit better the background map characteristics.
# Control figure size in here
fig, ax = plt.subplots(figsize=(12,8))
# Subset the data to seel only grid squares near the destination
subset = data.loc[(data['pt_r_t']>=0) & (data['pt_r_t']<=15)]
# Plot the data from subset
subset.plot(ax=ax, column='pt_r_t', cmap='RdYlBu', linewidth=0, scheme="quantiles", k=5, alpha=0.6)
# Add basemap with `OSM_A` style
ctx.add_basemap(ax, url=ctx.tile_providers.OSM_A)
As we can see now our map has much more details in it as the zoom level of the background map is larger. By default contextily sets the zoom level automatically but it is possible to also control that manually using parameter zoom. The zoom level is by default specified as auto but you can control that by passing in zoom level as numbers ranging typically from 1 to 19 (the larger the number, the more details your basemap will have).
Let’s reduce the level of detail from our map by passing
zoom=11:
# Control figure size in here
fig, ax = plt.subplots(figsize=(12,8))
# Plot the data from subset
subset.plot(ax=ax, column='pt_r_t', cmap='RdYlBu', linewidth=0, scheme="quantiles", k=5, alpha=0.6)
# Add basemap with `OSM_A` style using zoom level of 11
ctx.add_basemap(ax, zoom=11, url=ctx.tile_providers.OSM_A)
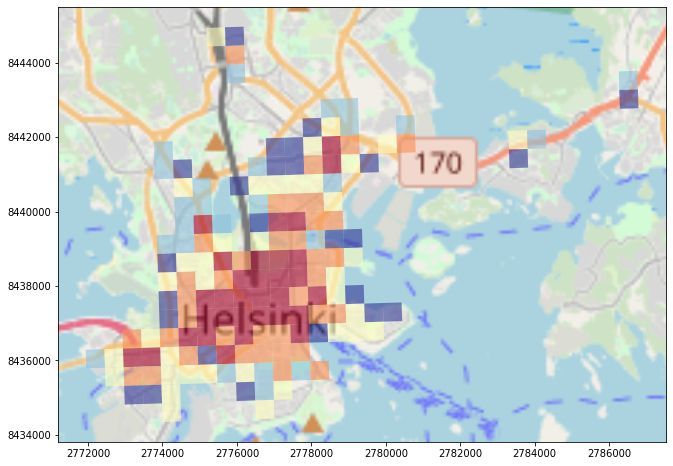
As we can see, the map has now less detail.
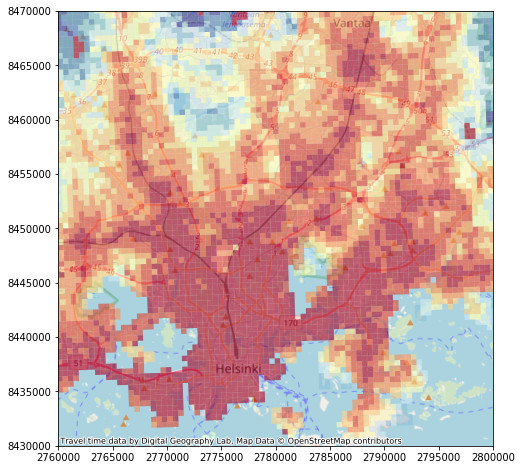
We can also use ax.set_xlim() and ax.set_ylim() -parameters to crop our map. The parameters takes as input the coordinates for minimum and maximum on both axis (x and y). We can also change / remove the contribution text by using parameter attribution
Let’s plot the original data, and crop the map:
# Control figure size in here
fig, ax = plt.subplots(figsize=(12,8))
# Plot the data
data.plot(ax=ax, column='pt_r_t', cmap='RdYlBu', linewidth=0, scheme="quantiles", k=9, alpha=0.6)
# Add basemap with `OSM_A` style using zoom level of 11
# Modify the attribution
ctx.add_basemap(ax, zoom=11, attribution="Travel time data by Digital Geography Lab, Map Data © OpenStreetMap contributors", url=ctx.tile_providers.OSM_A)
# Crop the figure
ax.set_xlim(2760000, 2800000)
ax.set_ylim(8430000, 8470000)
(8430000, 8470000)
It is also possible to use many other map tiles from different Tile Map Services as the background map. A good list of different available sources can be found from here. When using map tiles from different sources, it is necessary to parse a url address to the tile provider following a format defined by the provider.
Next, we will see how to use map tiles provided by CartoDB. To do that we need to parse the url address following their definition 'https://{s}.basemaps.cartocdn.com/{style}/{z}/{x}/{y}{scale}.png' where:
{s}: one of the available subdomains, either [a,b,c,d]
{z} : Zoom level. We support from 0 to 20 zoom levels in OSM tiling system.
{x},{y}: Tile coordinates in OSM tiling system
{scale}: OPTIONAL “@2x” for double resolution tiles
{style}: Map style, possible value is one of:
light_all,
dark_all,
light_nolabels,
light_only_labels,
dark_nolabels,
dark_only_labels,
rastertiles/voyager,
rastertiles/voyager_nolabels,
rastertiles/voyager_only_labels,
rastertiles/voyager_labels_under
We will use this information to parse the parameters in a way that contextily wants them:
# Control figure size in here
fig, ax = plt.subplots(figsize=(12,8))
# The formatting should follow: 'https://{s}.basemaps.cartocdn.com/{style}/{z}/{x}/{y}{scale}.png'
# Specify the style to use
style = "rastertiles/voyager"
cartodb_url = 'https://a.basemaps.cartocdn.com/%s/{z}/{x}/{y}.png' % style
# Plot the data from subset
subset.plot(ax=ax, column='pt_r_t', cmap='RdYlBu', linewidth=0, scheme="quantiles", k=5, alpha=0.6)
# Add basemap with `OSM_A` style using zoom level of 14
ctx.add_basemap(ax, zoom=14, attribution="", url=cartodb_url)
# Crop the figure
ax.set_xlim(2770000, 2785000)
ax.set_ylim(8435000, 8442500)
(8435000, 8442500)
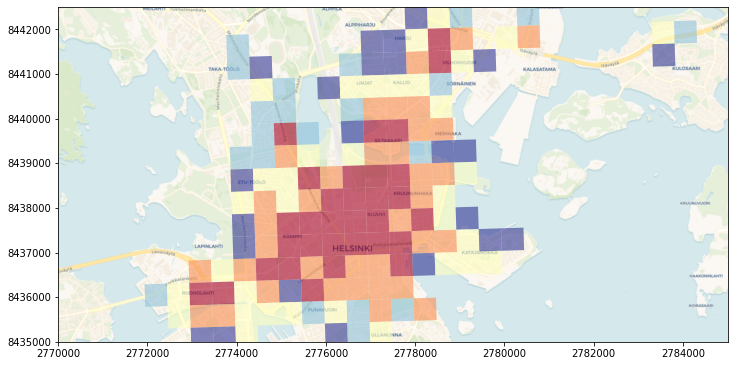
As we can see now we have yet again different kind of background map, now coming from CartoDB.
Let’s make a minor modification and change the style from
"rastertiles/voyager"to"dark_all":
# Control figure size in here
fig, ax = plt.subplots(figsize=(12,8))
# The formatting should follow: 'https://{s}.basemaps.cartocdn.com/{style}/{z}/{x}/{y}{r}.png'
# Specify the style to use
style = "dark_all"
cartodb_url = 'https://a.basemaps.cartocdn.com/%s/{z}/{x}/{y}.png' % style
# Plot the data from subset
subset.plot(ax=ax, column='pt_r_t', cmap='RdYlBu', linewidth=0, scheme="quantiles", k=5, alpha=0.6)
# Add basemap with `OSM_A` style using zoom level of 14
ctx.add_basemap(ax, zoom=13, attribution="", url=cartodb_url)
# Crop the figure
ax.set_xlim(2770000, 2785000)
ax.set_ylim(8435000, 8442500)
(8435000, 8442500)
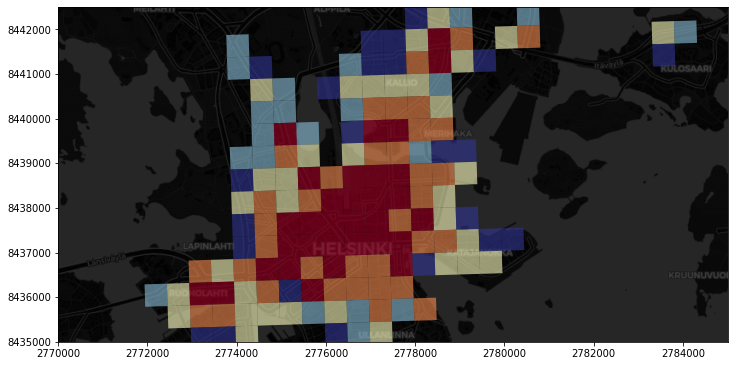
Great! Now we have dark background map fetched from CartoDB. In a similar manner, you can use any map tiles from various other tile providers such as the ones listed in leaflet-providers.